Residual Networks as Flows of Diffeomorphisms
This paper addresses the understanding and characterization of residual networks (ResNet), which are among the state-ofthe-art deep learning architectures for a variety of supervised learning problems. We focus on the mapping component of ResNets, which map the embedding space toward a new unknown space where the prediction or classification can be stated according to linear criteria. We show that this mapping component can be regarded as the numerical implementation of continuous flows of diffeomorphisms governed by ordinary differential equations. In particular, ResNets with shared weights are fully characterized as numerical approximation of exponential diffeomorphic operators. We stress both theoretically and numerically the relevance of the enforcement of diffeomorphic properties and the importance of numerical issues to make consistent the continuous formulation and the discretized ResNet implementation. We further discuss the resulting theoretical and computational insights into ResNet architectures.
Principles of Riemannian Geometry in Neural Networks
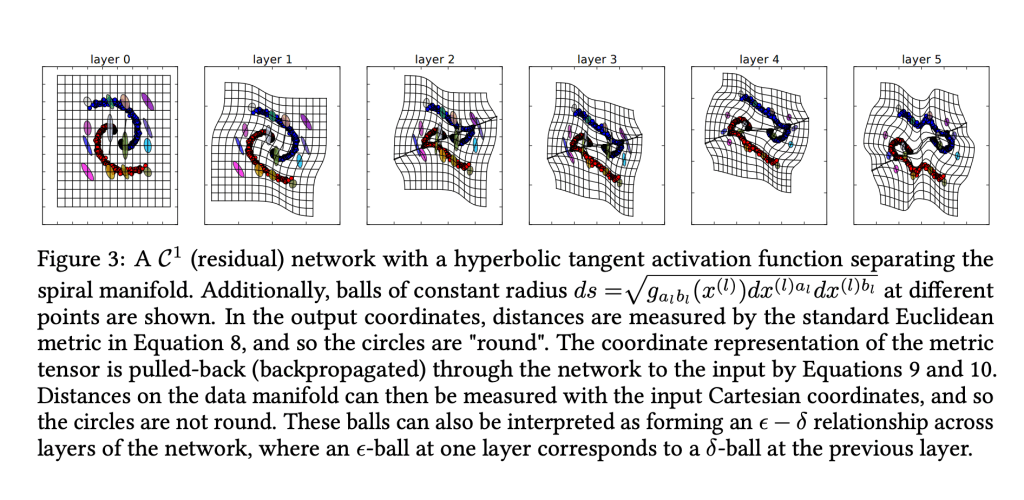
This study deals with neural networks in the sense of geometric transformations acting on the coordinate representation of the underlying data manifold which the data is sampled from. It forms part of an attempt to construct a formalized general theory of neural networks in the setting of Riemannian geometry. From this perspective, the following theoretical results are developed and proven for feedforward networks. First it is shown that residual neural networks are finite difference approximations to dynamical systems of first order differential equations, as opposed to ordinary networks that are static. This implies that the network is learning systems of differential equations governing the coordinate transformations that represent the data. Second it is shown that a closed form solution of the metric tensor on the underlying data manifold can be found by backpropagating the coordinate representations learned by the neural network itself. This is formulated in a formal abstract sense as a sequence of Lie group actions on the metric fibre space in the principal and associated bundles on the data manifold. Toy experiments were run to confirm parts of the proposed theory, as well as to provide intuitions as to how neural networks operate on data.
Unifying Language Learning Paradigms
Existing pre-trained models are generally geared towards a particular class of problems. To date, there seems to be still no consensus on what the right architecture and pre-training setup should be. This paper presents a unified framework for pre-training models that are universally effective across datasets and setups. We begin by disentangling architectural archetypes with pre-training objectives – two concepts that are commonly conflated. Next, we present a generalized and unified perspective for self-supervision in NLP and show how different pre-training objectives can be cast as one another and how interpolating between different objectives can be effective. We then propose Mixture-of-Denoisers (MoD), a pre-training objective that combines diverse pre-training paradigms together. We furthermore introduce a notion of mode switching, wherein downstream fine-tuning is associated with specific pre-training schemes. We conduct extensive ablative experiments to compare multiple pre-training objectives and find that our method pushes the Pareto-frontier by outperforming T5 and/or GPT-like models across multiple diverse setups. Finally, by scaling our model up to 20B parameters, we achieve SOTA performance on 50 well-established supervised NLP tasks ranging from language generation (with automated and human evaluation), language understanding, text classification, question answering, commonsense reasoning, long text reasoning, structured knowledge grounding and information retrieval. Our model also achieve strong results at in-context learning, outperforming 175B GPT-3 on zero-shot SuperGLUE and tripling the performance of T5-XXL on one-shot summarization. We release Flax-based T5X model checkpoints for the 20B model at https: //github.com/google-research/google-research/tree/master/ul2.
